Verbesserung der Bildqualität und Rauschreduzierung von BVS CA Industriekameras durch temporäres Averaging
1. Einleitung
Das folgende Dokument beschreibt, wie Sie das Entrauschen-Feature (Averaging oder Mittelung) der BVS CA-SF und BVS CA-GX Familien verwenden können. Hierzu benötigen Sie bei der BVS CA-SF1 mindestens die Firmwareversion 2.8.0, bei der BVS CA-SF2 mindestens die Version 2.14.2. Im Gegensatz zu Bildverarbeitungsalgorithmen wie Tiefpass- oder Mittelwertfilter verbessert temporäres Entrauschen (Averaging) die Bildqualität, ohne dass Informationen im Bild verloren gehen.
2. Was macht das Feature?
Nehmen wir an, dass jemand den Inhalt zweier Bilder addiert. Während die Bildhelligkeit verdoppelt wird, wird das Rauschen nicht verdoppelt, da es (meist) statistisch verteilt wird. Statistisch gesehen wird der Rauschpegel nur um den Faktor √2 steigen, sobald zwei Bilder addiert werden. Wird das Bild um den Faktor 2 geteilt, um die gleiche Helligkeit wieder zu erreichen, kann gesagt werden, dass der Rauschpegel gesenkt bzw. den Signal-Rausch-Pegel um 3 dB erhöht wurde.
3. Was passiert, wenn mehrere Bilder addiert werden?
Die EMVA1288 definiert eine Reihe von Funktionen und Messregeln für
-
den Dynamikbereich,
-
das Signal-Rausch-Verhältnis und
-
dem Dunkelstrom.
Die Dynamik beispielsweise ergibt sich aus dem Verhältnis zwischen der maximalen Füllmenge mit Ladungsträgern (Full Well Capacity) Nwell (oder nach EMVA1288 Aufnahmekapazität [Saturation Capacity]) und dem niedrigsten Signal, dem Dunkelstrom ndark ( Ndark [Dark Current]) gemäß folgender Formel:
Formel 1: Max. DNR eines Sensors
Das Signal-Rausch-Verhältnis ergibt sich aus dem Verhältnis zwischen maximaler Füllmenge mit Ladungsträgern (Full Well Capacity) und dem Rauschen, was eine geometrische Summe aus Dunkelstrom und Signalrauschen ist. Die Physik besagt, dass Signale in der Natur durch sogenanntes Schrotrauschen (auch Poissonsches Schrotrauschen oder Schottky-Rauschen) beeinflusst werden. Schrotrauschen ist proportional zum Mittelwert des eigenen Signals. In hellen Szenen überwiegt das Schrotrauschen bei Weitem, sodass SNR einfach als √Aufnahmekapazität bestimmt werden kann.
Formel 2: Vereinfachte max. SNR eines Sensors
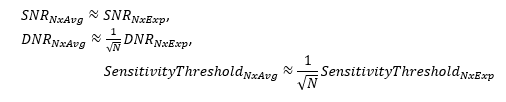
Bilder zu addieren ist wie das Addieren der Aufnahmekapazität. Das ergibt für DNR und SNR:

Formel 3: Durchschnitts-DNR eines Sensors

Formel 4: SNR-Erhöhung durch Entrauschen (Averaging)
Sowohl die Dynamik als auch das SNR werden durch √avg erhöht. Dies ist 20*(log (√avg)) dB
Beispiel: avg=16: DNR und SNR verbessern sich um den Faktor 4.
Das sind 12.04 dB oder entsprechend eine 2 Bit höhere Dynamik.
Die BVS CA-SF1 Serie kann bis zu 16 Bilder bei voller Bittiefe im Speicher der Kamera mitteln. Während die Kamera die Berechnung durchführt und die Bilder ausgibt, werden die neuen Bilder des Sensors. Der Datenfluss der gemittelten Bilder ist daher nicht kontinuierlich.
Die BVS CA-SF2 Serie kann die Bilder je nach Bildgröße und Bittiefe bis zu einer bestimmten Grenze summieren (z.B. BVS CA-SF2-0024Z: 56 Bilder@8 Bit oder 37 Bilder@12 Bit). Die Bildzufuhr ist kontinuierlich und kein eingehendes Bild wird verworfen.

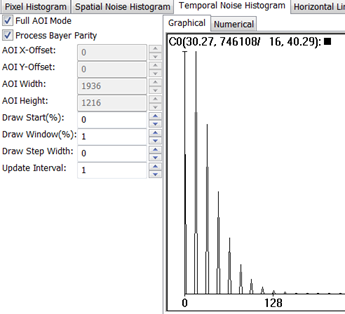
Der obige Screenshot zeigt ein Bild mit einer Verstärkung (Gain) von 42 dB (mittels Bit-Shifting) ohne Averaging. Die Standardabweichung des temporären Rauschens (Pixelpositionen von einem Bild zum nächsten) des ganzen Bildes beträgt 40,29 Stellen (16 Bit).
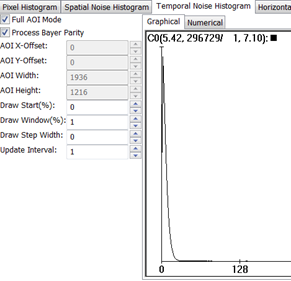
Der folgende Screenshot zeigt die gleiche Szene mit 32 gemittelten Bildern: Das Rauschen wurde erheblich reduziert und keine Details gingen im Bild verloren. Das Bild hat immer noch einen Gain von 42 dB! Dadurch konnte die Standardabweichung um den Faktor 5,6 =√avg verringert werden.

EMVA1288 Messungen mit der Kamera BVS CA-SF1-0013ZG, welche den CMOS-Sensor 76C560 von e2v mit 10 Bit ADC enthält, erzielt folgende Testergebnisse nach EMVA1288:
|
Averaging Modus |
16x |
4x |
aus |
|
Framerate [fps] |
3,7 |
15,1 |
60,5 |
|
SNR,max [dB] |
51,9 |
45,9 |
39,8 |
|
SNR,max [bit] |
8,6 |
7,6 |
6,6 |
|
Dunkelrauschen [DN] |
0,7 |
1,29 |
2,5 |
|
Dynamikumfang [dB] |
62,7 |
57,3 |
51,4 |
|
Dynamikumfang [bit] |
10,4 |
9,5 |
8,5 |
Sowohl SNR als auch DNR stimmten mit der dargelegten Theorie überein.
4. Was ist nun bei Anwendungen mit wenig Licht zu bevorzugen?
Bilder bei kurzer Belichtungszeit exp (erzeugt Nexp Photonen) mitteln avg oder ein Bild mit Belichtungszeit avg*exp nehmen?
Dies kann mit der Formel für DNR beantwortet werden: In dunkleren Szenen fügt das Mitteln zu Beginn Photonen hinzu, während Dunkelstrom um die Quadratwurzeln hinzugefügt wird.

Formel 5: DNR-Erhöhung durch Averaging

Formel 6: DNR-Erhöhung mittels Erhöhung der Belichtungszeit
Die Aufnahme eines Bildes mit einer höheren Belichtungszeit führt zu einer höheren Dynamik, da der Dunkelstrom nur einmal einkalkuliert werden muss.
Während Averaging perfekt für statische Bilder funktioniert, ist es offensichtlich, dass es bei Bildern mit Bewegung zu Bewegungsunschärfen oder verschwommenen Bildern kommt.
5. Wie kann man der Bewegungsunschärfe Herr werden? – Durch Running Average (adaptive Rauschreduzierung)!
Das bekannte Prinzip der adaptiven Rauschreduzierung ist in den FPGA einiger CCD-Kameras des Typs BVS CA-GX integriert.
Es wird angenommen, dass Pixel für Pixel die Abweichung des Grauwerts über Eingangssignal (Signal in) kontra Signal des Bildspeichers (Frame memory) ermittelt wird. Das eingehende Signal und das gemittelte Signal werden in einer umgekehrt proportionalen Art, dargestellt durch zwei Potenziometer, addiert. (D.h. umso mehr Eingangssignal desto weniger gemitteltes Signal).

Diese Eigenschaft wird durch einen „Slope“-Parameter gesteuert, sodass beispielsweise 10% Unterschied im Pixelwert zu 95% Eingangssignal und 5% gemitteltes Signal führen. Mit diesem Parameter kann die Rauschreduzierung auf Kosten von Bewegungsartefakten gesteuert werden. Dieser Ansatz eignet sich gut für Bewegung, denn es setzt auf den Fakt, dass das menschliche Auge auf Rauschen in bewegten Bildflächen empfindlicher reagiert, als bei statischen Bildflächen. Und genau das macht die Kamera. Statische Bildflächen werden entrauscht, da die Schleife „geschlossener“ ist. Bewegte Teile im Bild werden weniger entrauscht, da die Schleife für diese Pixel „geöffneter“ ist.
Weder wird durch das Entrauschen die Bildfrequenz reduziert noch kommt es zu einer Verzögerung. Der Grund ist einfach: Die Bildausgabe wird im FPGA noch vor dem Speicher erzeugt. Jedoch reduziert sich die Bildrate, da es zum Entrauschen einige Bilder benötigt.
Die folgenden Screenshots zeigen, dass sowohl in Bildern mit statischem Inhalt Entrauschung möglich ist als auch in Bildern mit bewegtem Inhalt gleichzeitig wenig Rauschen und Bewegungsunschärfe möglich sind.

Bild mit statischem Inhalt und hoher Verstärkung (Gain); ohne Rauschreduzierung

Gleiche, entrauschte Szene (Slope 1000)

Szene mit sich bewegendem Reifen
6.1. Belichtungszeit vs. Averaging / Summierung
Was ist der Unterschied zwischen eine N-mal längeren Belichtungszeit und N-Bild Averaging und Nfachen Verstärkung (Gain) eines Bildes (falls das aktuelle Bild zu dunkel ist)?
Beide Methoden führen zu einem gleichen Helligkeitsniveau beim finalen Bild.
-
Der erste offensichtliche Unterschied ist die Framerate. Beim Averaging wird die Framerate um die Anzahl der Bilder reduziert, die beim Averaging verwendet werden.
-
Aus Sicht der Bildqualität haben wir bereits gelernt, dass sich das temporäre Rauschen um die Wurzel der Anzahl der gemittelten Bilder reduziert. Das führt zu einem Signal-Rausch/Verhältnis, was annähernd dem N-mal Belichtung vs. N-mal Averaging und N-mal Gain entspricht. Der Hauptunterschied ist, dass das Averaging auch beim Ausleserauschen des Sensor Anwendung findet und unabhängig von der Belichtungszeit ist. Das bedeutet, dass die Reizschwelle (Sensitivity Threshold) auf jeden Fall reduziert wird.
-> Averaging erhöht die Empfindlichkeit der Kamera, während eine längere Belichtungszeit zu einem höheren Dynamikumfang führt. Für lichtschwache Anwendungen ist letzteres meist weniger wichtig, Averaging dagegen schon.
Bild ist N-mal zu dunkel:
-
Bei einer N-mal längeren Belichtung ergibt das:
-
Bei N-mal Gain und N-mal Averaging ergibt das:
6.2.1. SNR
Aufgrund der Poisson-Verteilung entspricht die Abweichung dem Mittelwert. Wenn wir annehmen, dass wir nur 1/𝑁 der möglichen Sättigungsniveaus (saturation) 𝑁𝑠𝑎𝑡 erreichen, können wir N-mal Belichtung verwenden, um 𝑁𝑠𝑎𝑡 zu erhalten:
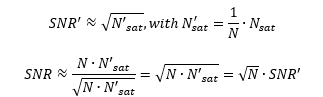
Werden Bilder hinzugefügt (für Averaging gilt das Gleiche):

Auf diese Weise erhalten wir für N-mal Belichtung oder N-mal Averaging/Summierung den gleichen SNR-Wert

6.2.3. Reizschwelle (Sensitivity Threshold)
Bei unterschiedlichen Belichtungszeiten bleibt der Wert konstant, da keine Abhängigkeit zur Belichtungszeit besteht. Sobald Bilder hinzugefügt werden, ergibt das:

Und folglich:
Simulationswerte:
|
Max Saturation |
10000 e- |
|
Read-Noise |
2 e- |
|
original |
Bright Noise: 27.95 e-, Dark Noise: 2.02 e-, SNR: 93.52 | 39.42 dB, DNR: 1294.49 | 62.24 dB |
|
4 x exposure |
Bright Noise: 58.26 e-, Dark Noise: 2.21 e-, SNR: 180.01 | 45.11 dB, DNR: 4742.76 | 73.52 dB |
|
4 x average |
Bright Noise: 13.96 e-, Dark Noise: 1.01 e-, SNR: 187.28 | 45.45 dB, DNR: 2588.27 | 68.26 dB |
Disclaimer
Die hier unentgeltlich bereitgestellte technische Information zu Ihrer Anfrage basiert auf dem von BALLUFF vorliegenden Kenntnisstand um Sie bestmöglich bei Ihrer technischen Fragestellung bzw. Anwendung zu unterstützen und Lösungsansätze aufzuzeigen.
Nachdem die technische Information unentgeltlich zur Verfügung gestellt wird, ist die Sach- und Rechtsmängelhaftung von BALLUFF ausgeschlossen, es sei denn, es liegt eine vorsätzliche oder grob fahrlässige Pflichtverletzung von BALLUFF oder Arglist auf Seiten von BALLUFF vor. Diesbezüglich haftet BALLUFF auf Schadenersatz wegen Mängeln der technischen Information oder wegen der Verletzung sonstiger vertraglicher oder außervertraglicher Pflichten nur bei Vorsatz oder grober Fahrlässigkeit. Die vorstehende Haftungsbeschränkung gilt nicht bei Arglist, bei Verletzungen des Lebens, des Körpers oder der Gesundheit, bei der Übernahme einer Garantie sowie bei der Haftung nach dem Produkthaftungsgesetz. Eine weitergehende Haftung von BALLUFF ist ausgeschlossen.
Prüfen Sie vor dem Einsatz in Anlagen und Maschinen, ob die hier bereitgestellte, unentgeltliche Information für Ihre Anwendung geeignet ist. Mit der Nutzung der hier unentgeltlich vorgelegten Informationen erkennen Sie diese Haftungsregelung an.