
BTL, or precision position control as an alternative to servo drives
Case study
Reading Time: minutes
Packaging is a process that occurs in every manufacturing plant. Regardless of whether we are packing semi-finished products used in further operations on the line next door or the finished product shipped to the customer, these processes are labour-intensive and sometimes monotonous.
The steps required during the packaging process are one of the most commonly automated processes. The same applies to the reverse process - unpacking. We are pleased to present two implementation examples illustrating how the aforementioned processes can be automated in a cost-effective manner using Balluff's BTL position encoders.
The situation at hand
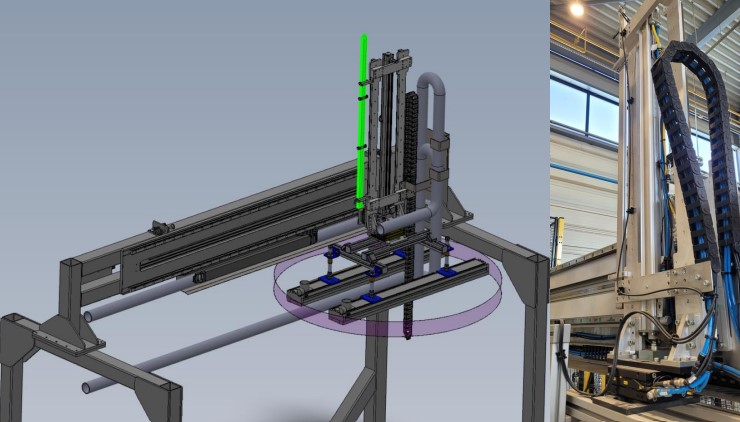
In the first application example, the operator of an automated machine was packing turned rollers into a Kolox-type container.
Problem
The rollers are stacked side by side with another finished piece appearing every ten seconds or so. Due to the fact that one operator was needed to operate two packing stations, a cost reduction was required to ensure maximum production and payback on investment for the machine.
Solution
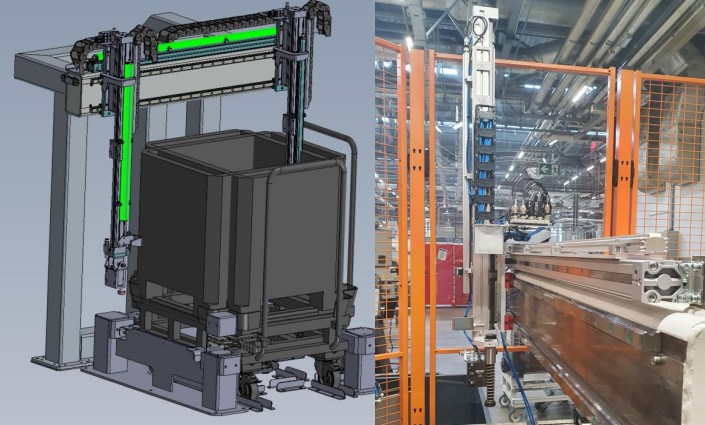
To automate this operation, it was necessary to build a two-axis manipulator that can stop in multiple positions. The unwritten standard in this type of case is the use of a Cartesian robot built with servomotor-drive control. Such a solution provides precision of up to hundredths of a millimetre and high dynamics of operation, which in this process would be definitely overkill. In our application, we decided to use pneumatic drives equipped with BTL sensors for position control. Such a solution allows achieving accuracy of +/-2 mm and dynamics sufficient for the current process. Using the BTL for position control in this case makes it possible to deposit rollers in the correct sequence. The second application example is the depalletising of wooden crossbars at an oven packing station.
A stagnant situation
In order to be able to automate the process, one of the necessary operations was the removal of crossbars stacked in layers from the pallet.
Problem
The large number of crossbars and the average cycle time on the line meant that the frequency of removing a layer of parts did not exceed one operation every few minutes. During depalletisation, there was a risk that an unstable stack of crossbars may collapse, making it impossible to split the layer and depalletise it correctly.
Solution
With these boundary conditions in mind, in order to reduce costs, we decided to build a two-axis manipulator based on pneumatic drives. The vertical drive, which was to stop in multiple positions, was equipped with a BTL position transducer. Position control was an important part of the operation as there were spacers between the layers, which also had to be retrieved and used in the process.
How it works
The BTL position transducer, with its highly accurate measurement and high-speed communication, enables dynamic position control during movement. Combining the BTL with an appropriately designed pneumatic control system allows the axis to be precisely stopped at the desired location.
Benefits for the company
By using a BTL position transducer from the Profile Series equipped with an IO-link interface, the precise and dynamic position control necessary for the processes was possible in both of these cases. The use of the aforementioned position encoder allowed the use of pneumatic drives instead of servo drives, which in turn reduced the cost of manufacturing the Cartesian system by about 50% compared to the "classic" version, while retaining important elements of its functionality. The additional advantage of the applied solution is the possibility of connecting BTL to an IO-link network. By using IO-Link standard sensor cables can be used connect the devices to the control cabinet, negating the need for large cross section shielded cabling that would have been required if using servo drives.
Company description
TeamBlue Roboticsis formed by a group of people with a passion in the field of industrial automation and robotics. We operate in industries such as automotive, white goods and consumer electronics manufacturing, furniture, electrical and electronics, aerospace, food, cosmetics and metalworking. We also carry out R&D projects.

Keywords
- Case Study
- Innovations
Author

Balluff Sp. z o.o.
We have been active on the Polish market for more than 25 years. We serve our customers from Pomerania to the Tatra Mountains, providing first-class service and technical support. We are also present online, where we share our knowledge about the latest implementations, industry trends, events or technical aspects of our solutions.
41 Contributions
Comment
Popular posts
What is a capacitive sensor?
How do I wire my 3-wire sensors?
Industrial sensing fundamentals – NPN vs PNP
The industrial revolution - from the steam engine to Industry 4.0
Contact form
Balluff Limited
-
20 Cheshire Business Park
Cheshire Avenue
Lostock Gralam
Northwich, CW9 7UA