
BTL, vagy precíziós pozícióvezérlés a szervohajtások alternatívájaként
Esettanulmány
Olvasási idő: percek
A csomagolás olyan folyamat, amely minden gyártóüzemben előfordul. Függetlenül attól, hogy a szomszéd gyártósoron további műveletekhez használt félkész termékeket vagy az ügyfélnek szállított készterméket csomagoljuk, ezek a folyamatok munkaigényesek és néha monotonok.
A csomagolási folyamat során szükséges lépések az egyik leggyakrabban automatizált folyamatok közé tartoznak. Ugyanez vonatkozik a fordított folyamatra - a kicsomagolásra. Örömmel mutatunk be két megvalósítási példát, amelyek azt szemléltetik, hogyan lehet a fent említett folyamatokat költséghatékonyan automatizálni a Balluff BTL pozíciójeladóinak használatával.
Jelenlegi helyzet
Az első alkalmazási példában egy automatizált gép kezelője forgatott görgőket csomagolt egy Kolox típusú tartályba.
Probléma
A görgők egymás mellé vannak rakva, és körülbelül tíz másodpercenként újabb kész darab jelenik meg. Mivel egy kezelőre volt szükség két csomagolóállomás működtetéséhez, ezért költségcsökkentést kellet végrehajtani a maximális termelés, valamint a gép beruházásának megtérülése érdekében.
Megoldás
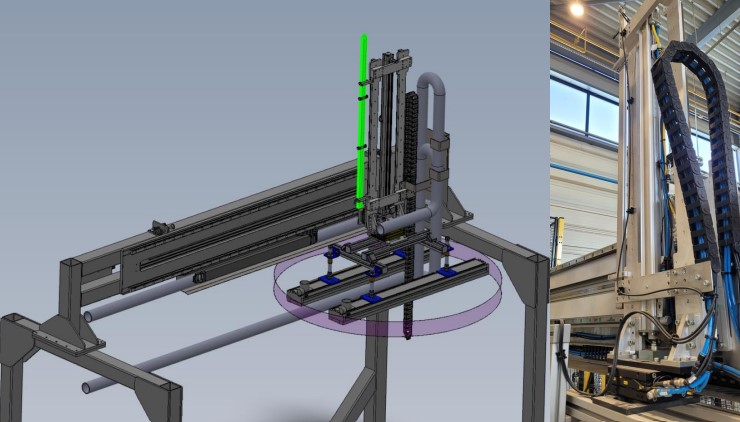
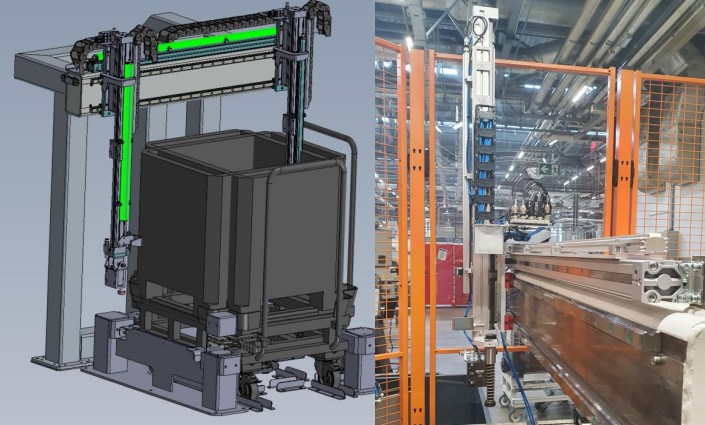
A művelet automatizálásához szükség volt egy kéttengelyes manipulátor felépítésére, amely több pozícióban is megállhat. Az íratlan szabvány az ilyen típusú esetekben a szervomotor-hajtásvezérléssel épített Descartes-robot használata. Egy ilyen megoldás akár századmilliméteres pontosságot és nagy működési dinamikát biztosít, ami ebben a folyamatban határozottan túlzás lenne. Alkalmazásunkban úgy döntöttünk, hogy BTL érzékelőkkel felszerelt pneumatikus hajtásokat használunk a pozícióvezérléshez. Egy ilyen megoldás lehetővé teszi +/- 2 mm-es pontosság és az aktuális folyamathoz elegendő dinamika elérését. A BTL használata a pozícióvezérléshez ebben az esetben lehetővé teszi a görgők megfelelő sorrendben történő elhelyezését. A második alkalmazási példa a fa keresztrudak raklapról való levétele egy kemence csomagolóállomásán.
Stagnáló helyzet
A folyamat automatizálása érdekében az egyik szükséges művelet a rétegekbe rakott kereszttartók eltávolítása volt a raklapról.
Probléma
A keresztlécek nagy száma és a gyártósor az átlagos ciklusideje azt jelentette, hogy az alkatrészréteg eltávolításának gyakorisága nem haladta meg a néhány percenkénti egy műveletet. A raklapról való levétel során fennállt a veszélye annak, hogy a keresztrudak instabil halmaza összeomlik, ami lehetetlenné tette a réteg felosztását és a megfelelő depalettázást.
Megoldás
Ezeket a peremfeltételeket szem előtt tartva, a költségek csökkentése érdekében úgy döntöttünk, hogy pneumatikus hajtásokon alapuló kéttengelyes manipulátort építünk. A függőleges hajtás, amelynek több pozícióban kellett megállnia, BTL helyzetátalakítóval volt felszerelve. A pozícióvezérlés fontos része volt a műveletnek, mivel a rétegek között távtartók voltak, amelyeket szintén vissza kellett keresni és felhasználni a folyamatban.
Hogyan működik
A BTL pozícióátalakító rendkívül pontos mérésével és nagy sebességű kommunikációjával lehetővé teszi a dinamikus pozícióvezérlést mozgás közben. A BTL és a megfelelően megtervezett pneumatikus vezérlőrendszer kombinálása lehetővé teszi a tengely pontos leállítását a kívánt helyen.
Előnyök a vállalat számára
A Profile sorozat IO-link interfésszel ellátott BTL pozíciójeladójának használatával mindkét esetben lehetséges volt a folyamatokhoz szükséges pontos és dinamikus pozícióvezérlés. A fent említett helyzetkódoló használata lehetővé tette a pneumatikus hajtások használatát szervohajtások helyett, ami mintegy 50% -kal csökkentette a derékszögű rendszer gyártási költségeit a "klasszikus" változathoz képest, miközben megtartotta funkcionalitásának fontos elemeit. Az alkalmazott megoldás további előnye, hogy a BTL-t IO-link hálózathoz lehet csatlakoztatni. Az IO-Link segítségével szabványos érzékelőkábelek használhatók, amelyek csatlakoztatják az eszközöket a vezérlőszekrényhez, így nincs szükség nagy keresztmetszetű árnyékolt kábelezésre, amelyre szervohajtások használata esetén lett volna szükség.
A vállalat leírása
A Blue Roboticscsapatát olyan emberek alkotják, akik szenvedélyesen érdeklődnek az ipari automatizálás és a robotika iránt. Olyan iparágakban tevékenykedünk, mint az autóipar, a háztartási cikkek és a fogyasztói elektronikai cikkek gyártása, a bútorgyártás, az elektromos és elektronikai ipar, a repülőgépipar, az élelmiszeripar, a kozmetikumok és a fémmegmunkálás. Továbbá K+F projekteket is végez vállalatunk.

Kulcsszavak
- Case Study
- Innovationen
Szerző

Balluff Sp. z o.o.
Több mint 25 éve vagyunk aktívak a lengyel piacon. Ügyfeleinket Pomerániától a Tátráig szolgáljuk ki, első osztályú szolgáltatást és műszaki támogatást nyújtva. Online is jelen vagyunk, ahol megosztjuk tudásunkat a legújabb megvalósításokról, iparági trendekről, eseményekről vagy megoldásaink technikai aspektusairól.
10 Hozzájárulások
Comment
Népszerű hozzászólások
Automatizálás kezdőknek - Balluff útmutató
Biztonság az RFID technológiában
Az ipari forradalom - a gőzgéptől az Ipar 4.0-ig
Induktív közelítésérzékelők előnyei az iparban
Kapcsolatfelvételi űrlap
Kérdése vagy javaslata van? Szívesen segítünk!
Balluff-Elektronika Kft.
-
8200 Veszprém
Pápai út 55