3D-maskinseende
3D Machine Vision enkelt och flexibelt att använda
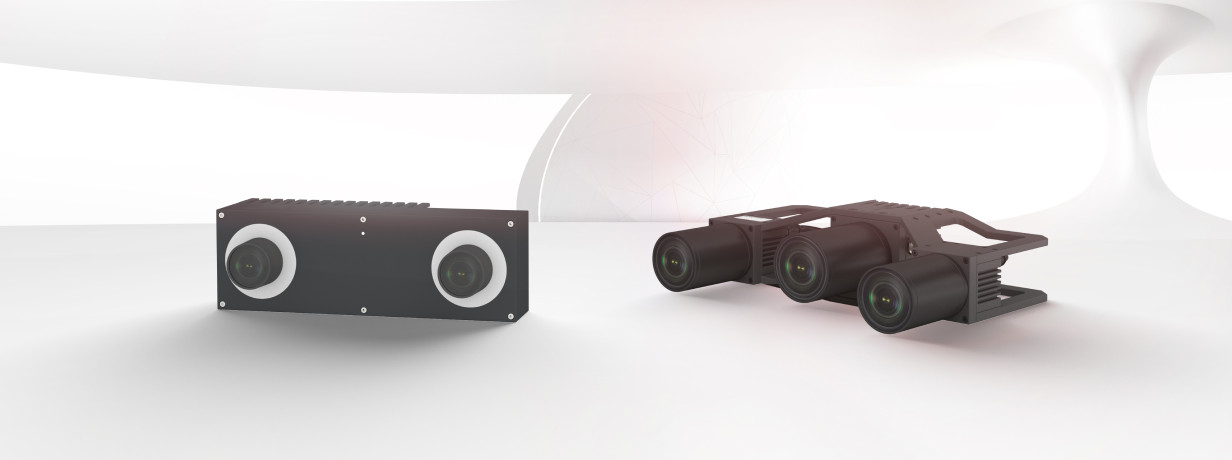
Våra 3D-kameror är idealiska för stationära och mobila robottillämpningar och erbjuder hög flexibilitet i användningen. Med hög upplösning, för tuffa miljöer eller med applikationsspecifika, integrerade programvarumoduler - vår 3D-portfölj erbjuder rätt lösning för alla krav.
Datakvalitet på högsta nivå
Den högupplösta 3D-stereokameran imponerar med sin unika djupbildskvalitet och är därför lämplig för användning med ett särskilt stort arbetsområde såväl som för att plocka små föremål från lastbärare. Med justerbara objektiv på kamerorna och projektorn kan 3D-stereokameran anpassas optimalt till det önskade arbetsområdet. GigE Vision-gränssnittet ger hög flexibilitet i programvaruapplikationen.
Programvarumoduler för specifika applikationer
Den smarta 3D-kamerafamiljen är utrustad med ett omfattande inbyggt programvarupaket. Detta möjliggör effektiv och tillförlitlig objektdetektering, inomhusnavigering och räckviddsplanering. För att optimera användningen för specifika applikationsscenarier kan valfria programvarumoduler användas, till exempel BoxPick och ItemPick.
Alternativt kan GigE Vision-gränssnittet användas för skräddarsydda programvaruapplikationer.
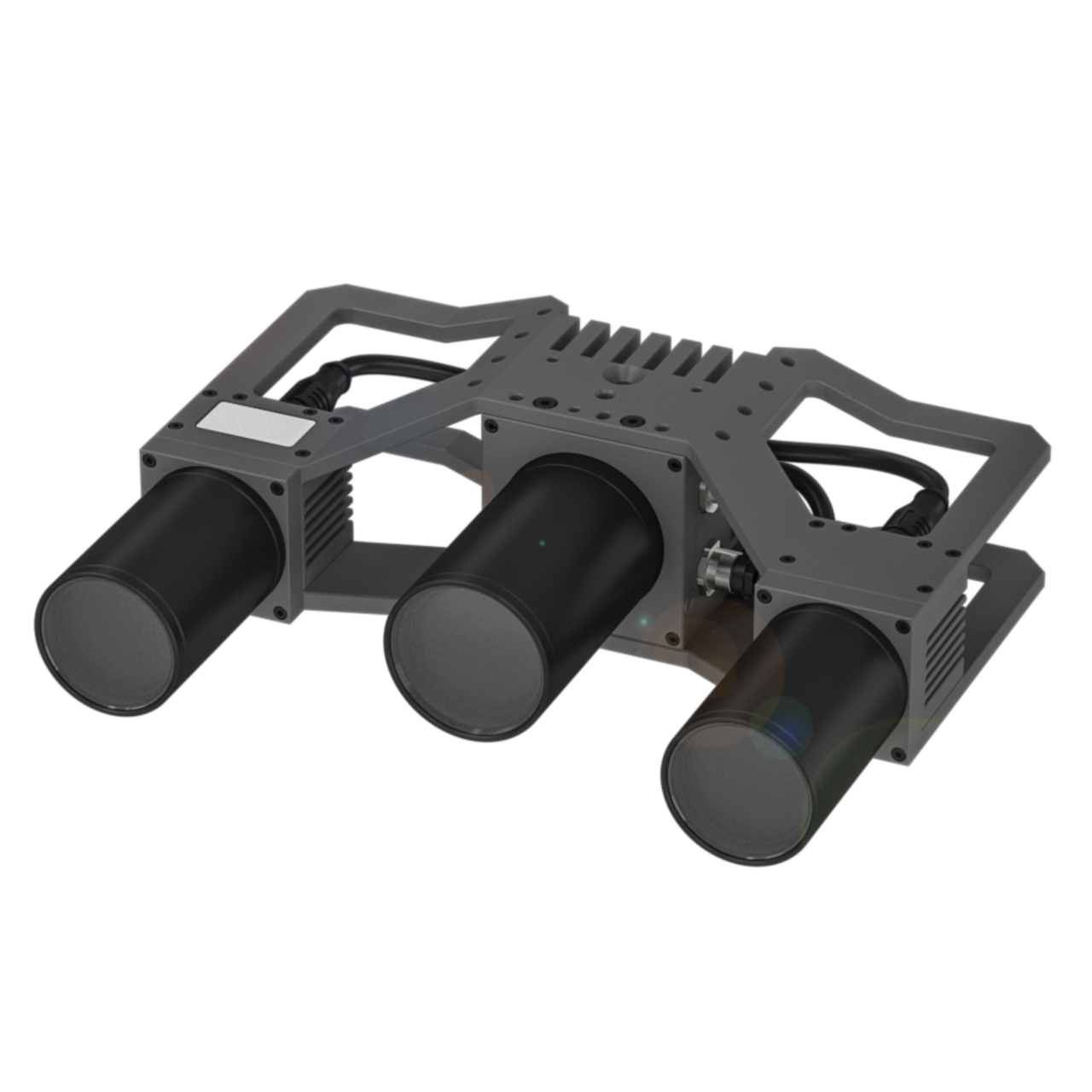
3D-stereokamera
- 3D-stereokamera för industriella 3D-tillämpningar
- Hög tillämpningsflexibilitet tack vare GigE Vision-gränssnittet
- klarar sig bra i tuffa miljöer tack vare det IP54-skyddade höljet
- möjliggör mycket noggrann 3D-bildbehandling genom 12 MPix-upplösning av 3D-data och 2D-bilder.
- optimalt anpassningsbar till ditt arbetsområde genom justerbara objektiv på kameror och projektorer
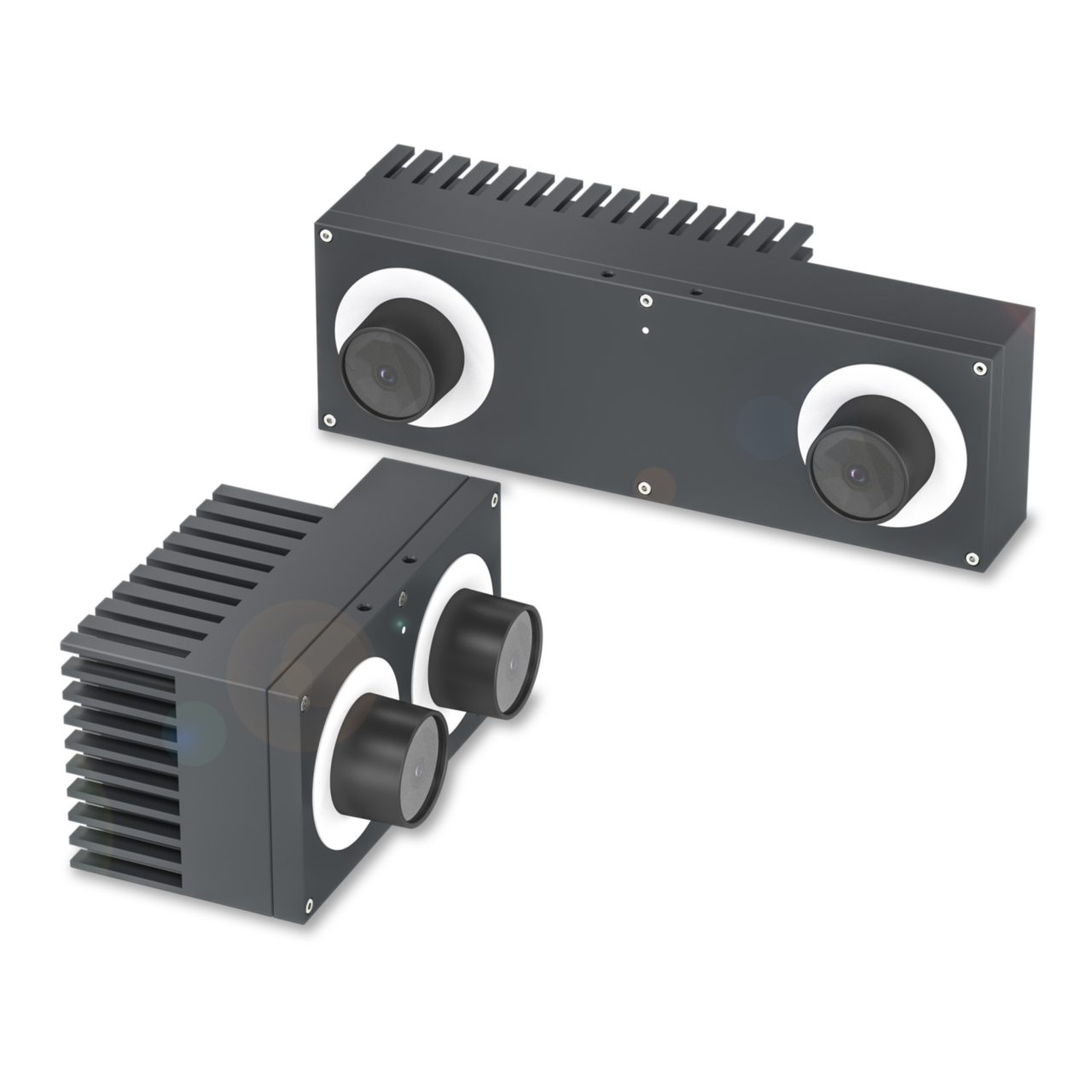
Smart 3D-kamera
- Smart 3D-kamera för robottillämpningar
- Enkel användning genom användarvänligt, webbaserat användargränssnitt
- Hög flexibilitet genom valbara programvarumoduler och GigE Vision-gränssnitt
- Låga systemkostnader genom inbyggd bearbetning och smarta, applikationsspecifika programvarumoduler
ItemPick
Modul för robotar som plockar och släpper med sugkuddar.
BoxPick
Modul för robotiserad depalletering eller sortering av förpackningar.
TagDetect
En modul för snabb upptäckt av QR-koder och AprilTags.
SLAM
Gör det möjligt för 3D-kameran att skapa en karta över omgivningen och samtidigt uppskatta den faktiska platsen.
CADMatch
Gör det möjligt för robotsystemet att på ett tillförlitligt sätt upptäcka, lokalisera och ta tag i föremål i sorterade lastbärare.
SilhouetteMatch
Detekterar position och orientering av jämförelsevis plana objekt på plana ytor.