3D Machine Vision
3D Machine Vision eenvoudig en flexibel in gebruik
Onze 3D-camera's zijn ideaal voor stationaire en mobiele robottoepassingen en bieden een hoge flexibiliteit in gebruik. Met hoge resolutie, voor ruwe omgevingen of met toepassingsspecifieke, geïntegreerde softwaremodules, ons 3D-assortiment biedt het juiste antwoord voor elke vereiste.
Gegevenskwaliteit op het hoogste niveau
De 3D-stereocamera met hoge resolutie maakt indruk met zijn unieke dieptebeeldkwaliteit en is daarom geschikt voor gebruik met een bijzonder groot werkgebied en voor het verzamelen van kleine voorwerpen uit ladingdragers. Dankzij de instelbare lenzen op de camera's en de projector kan de 3D-stereocamera optimaal worden aangepast aan het gewenste werkgebied. De GigE Vision interface biedt een hoge flexibiliteit in de softwaretoepassing.
Softwaremodules voor specifieke toepassingen
De slimme 3D-camerafamilie is uitgerust met een uitgebreid onboard softwarepakket. Dit maakt efficiënte en betrouwbare objectdetectie, binnennavigatie en bereikplanning mogelijk. Om het gebruik voor specifieke toepassingsscenario's te optimaliseren, kunnen optionele softwaremodules worden gebruikt, zoals BoxPick en ItemPick.
Ook kan de GigE Vision interface worden gebruikt voor softwareapplicaties op maat.
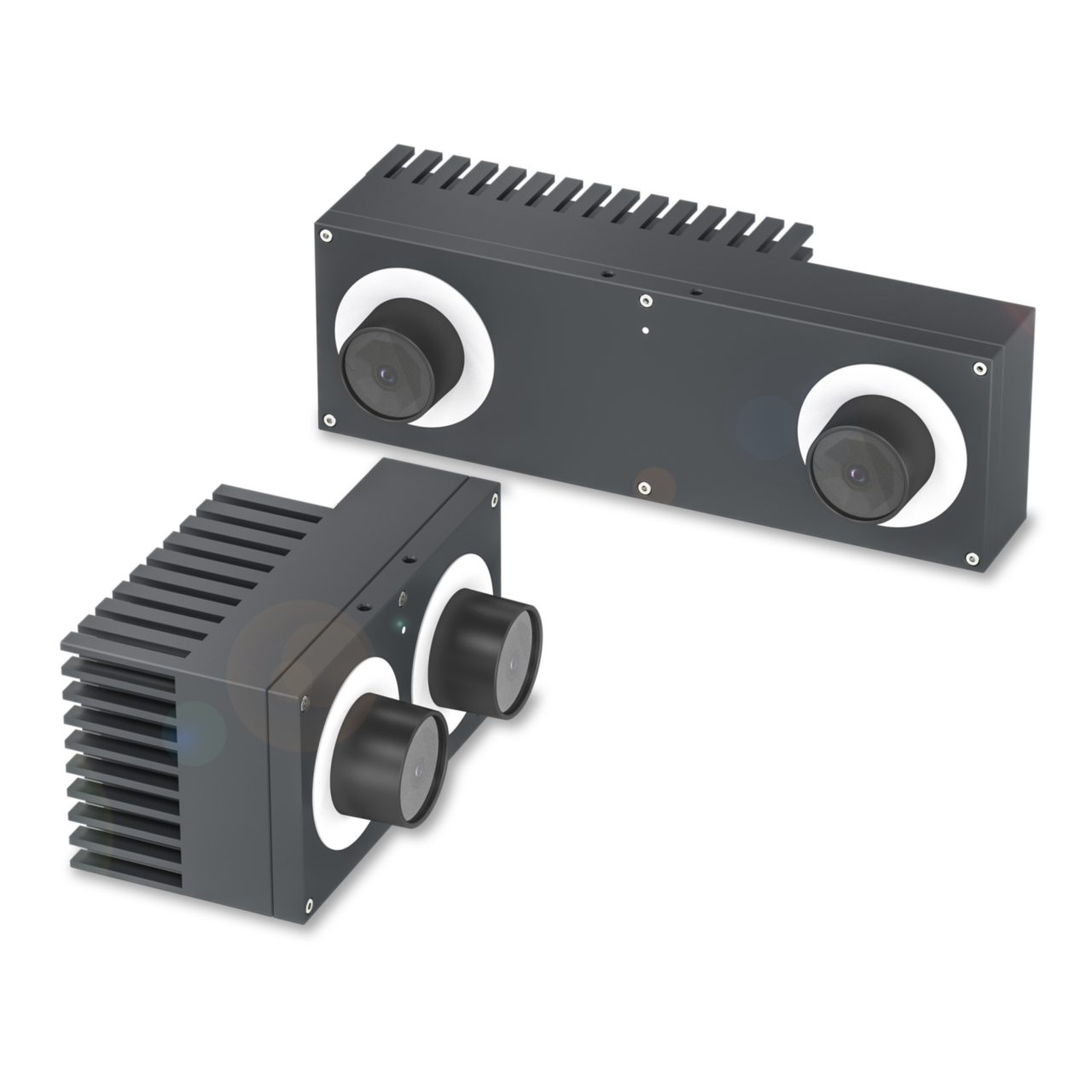
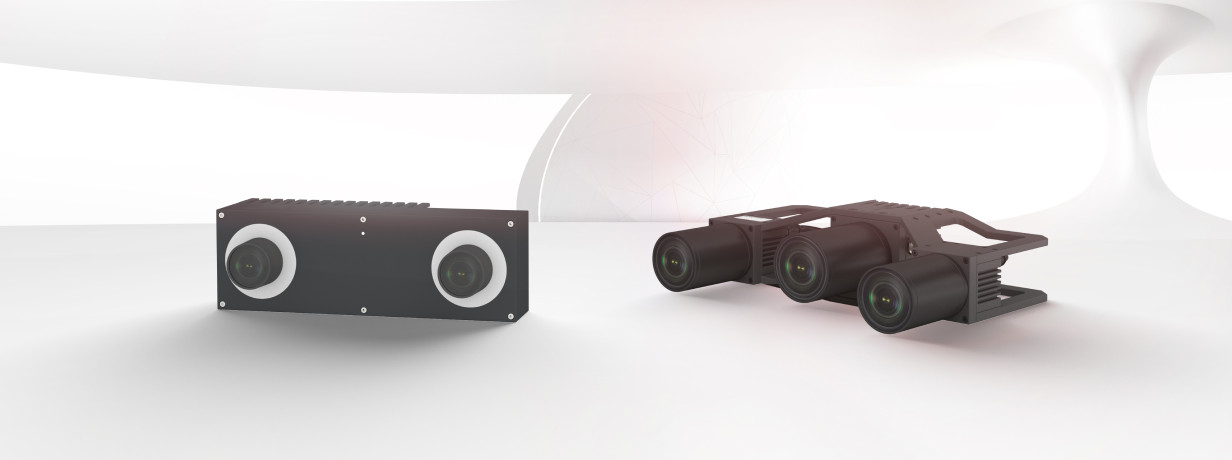
Slimme 3D-camera
- Slimme 3D-camera voor robottoepassingen
- Eenvoudige bediening via gebruiksvriendelijke, webgebaseerde gebruikersinterface
- Hoge flexibiliteit door optionele softwaremodules en GigE Vision-interface
- Lage systeemkosten door on-board processing en slimme, toepassingsspecifieke softwaremodules
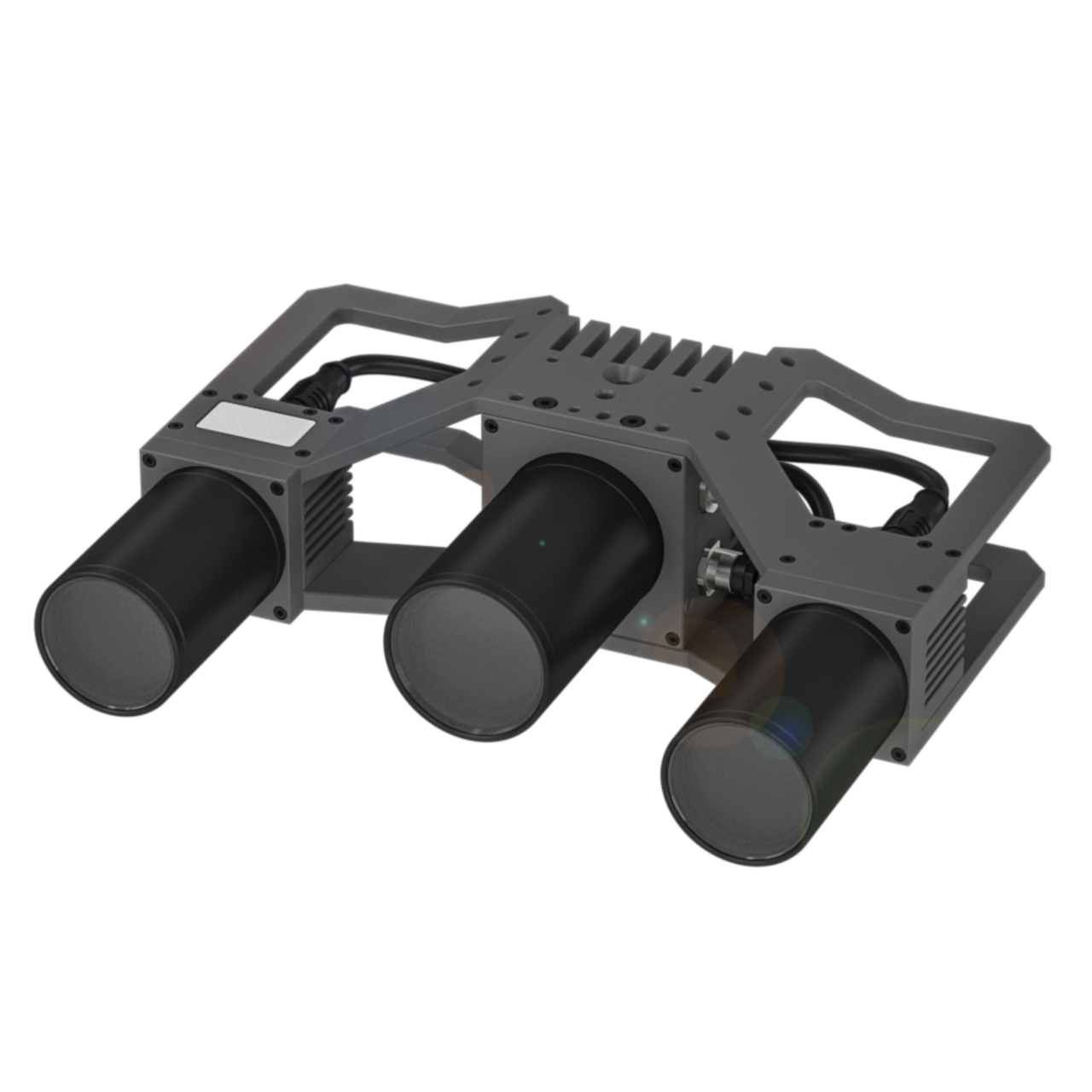
3D-stereocamera
- 3D-stereocamera voor industriële 3D-toepassingen
- hoge toepassingsflexibiliteit dankzij GigE Vision-interface
- presteert goed in ruwe omgevingen dankzij IP54 beschermde behuizing
- maakt zeer nauwkeurige 3D-beeldverwerking mogelijk door 12 MPix-resolutie van 3D-gegevens en 2D-beelden
- optimaal aanpasbaar aan uw werkruimte door verstelbare lenzen op camera's en projector
ItemPick
Module voor robotische "pick-and-drop" toepassingen met zuiggrijpers.
BoxPick
Module voor robotisch palletiseren of sorteren van pakketten.
TagDetect
Een module voor snelle detectie van QR codes en AprilTags.
SLAM
Hiermee kan de 3D-camera een kaart van de omgeving maken en tegelijkertijd de werkelijke locatie schatten.
CADMatch
Zorgt ervoor dat het robotsysteem op betrouwbare wijze voorwerpen in gesorteerde ladingdragers kan detecteren, lokaliseren en grijpen.
SilhouetteMatch
Detecteert de positie en oriëntatie van relatief vlakke voorwerpen op vlakke oppervlakken.